Categorias: Artigos em destaque » Domótica
Número de visualizações: 149188
Comentários sobre o artigo: 5
O princípio de operação e o básico da programação de CLP
Controladores lógicos programáveis (PLCs)
 Antes do advento dos circuitos lógicos de estado sólido, o desenvolvimento de sistemas de controle lógico era baseado em relés eletromecânicos. Até hoje, os relés não estão desatualizados em seu destino, mas, em algumas de suas funções anteriores, são substituídos por um controlador.
Antes do advento dos circuitos lógicos de estado sólido, o desenvolvimento de sistemas de controle lógico era baseado em relés eletromecânicos. Até hoje, os relés não estão desatualizados em seu destino, mas, em algumas de suas funções anteriores, são substituídos por um controlador.
Na indústria moderna, há um grande número de sistemas e processos diferentes que exigem automação, mas agora esses sistemas raramente são projetados a partir de relés. Os processos de produção modernos precisam de um dispositivo programado para executar várias funções lógicas. No final dos anos 1960, a empresa americana Bedford Associates desenvolveu um dispositivo de computador chamado MODICON (Modular Digital Controller). Mais tarde, o nome do dispositivo passou a ser o nome da unidade da empresa que o projetou, fabricou e vendeu.
Outras empresas desenvolveram suas próprias versões deste dispositivo e, no final, ficou conhecido como CLP ou controlador lógico programável. O objetivo de um controlador programável capaz de simular a operação de um grande número de relés era substituir relés eletromecânicos por elementos lógicos.
O CLP possui um conjunto de terminais de entrada com os quais você pode monitorar o status dos sensores e comutadores. Também existem terminais de saída que fornecem um sinal "alto" ou "baixo" para indicadores de energia, válvulas solenóides, contatores, pequenos motores e outros dispositivos de auto-monitoramento.
Os CLPs são fáceis de programar porque sua linguagem de programação se assemelha à lógica de um relé. Assim, um eletricista industrial comum ou um engenheiro elétrico, acostumado a ler circuitos lógicos em escada, sentir-se-á à vontade ao programar um CLP para executar as mesmas funções.
A conexão do sinal e a programação padrão são um pouco diferentes para os diferentes modelos de CLP, mas são bastante semelhantes, o que permite colocar aqui uma introdução "geral" à programação deste dispositivo.
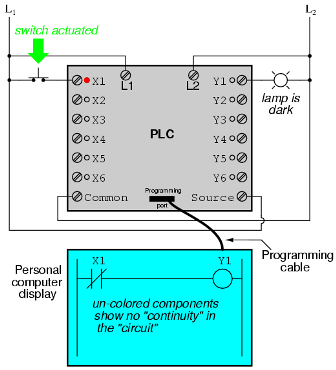
A ilustração a seguir mostra um CLP simples, ou melhor, como ele pode parecer na frente. Dois terminais de parafuso para conectar circuitos internos do CLP de até 120 VCA estão marcados como L1 e L2.
Seis terminais de parafuso localizados no lado esquerdo fornecem conexão para dispositivos de entrada. Cada terminal representa seu canal de entrada (X). O terminal de parafuso (conexão "geral") localizado no canto inferior esquerdo geralmente é conectado à fonte de corrente L2 (neutra) com uma tensão de 120 V CA.

Dentro da caixa do PLC que conecta cada terminal de entrada a um terminal comum, existe um isolador de dispositivo (LED) que fornece um sinal "alto" eletricamente isolado para o circuito do computador (um fototransistor interpreta a luz do LED) quando uma corrente alternada de 120 volts é instalada entre o terminal de entrada correspondente e o comum terminal. O LED na frente do CLP possibilita entender qual entrada está ativa:

Os sinais de saída são gerados pelo circuito do computador do PLC, ativando um dispositivo de comutação (transistor, tiristor ou mesmo um relé eletromecânico) e conectando o terminal "Source" (canto inferior direito) a qualquer saída marcada com a letra Y. O terminal Source é geralmente associado ao L1. Assim como todas as entradas, cada saída energizada é marcada com um LED:

Assim, o PLC pode ser conectado a qualquer dispositivo, como interruptores e eletroímãs.
Noções básicas de programação de CLP
A lógica moderna do sistema de controle é instalada no CLP através de um programa de computador.Este programa determina quais saídas estão ativas e sob quais condições de entrada. Embora o próprio programa se assemelhe a um circuito lógico de relé, não há contatos de chave ou bobinas de relé operando dentro do CLP para criar conexões entre entrada e saída. Esses contatos e bobinas são imaginários. O programa é gravado e visualizado usando um computador pessoal conectado à porta de programação do PLC.
Considere o seguinte circuito e programa PLC:

Quando o botão de pressão não está ativado (no estado desligado), o sinal não é enviado para a entrada X1. De acordo com o programa, que mostra a entrada "aberta" X1, o sinal não será enviado para a saída Y1. Assim, a saída Y1 permanecerá desenergizada e o indicador conectado a ela será desligado.
Se o botão for pressionado, o sinal será enviado para a entrada X1. Todos os contatos X1 no programa assumem um estado ativado, como se fossem contatos de relé ativados fornecendo tensão a uma bobina de relé chamada X1. Nesse caso, o contato aberto X1 será "fechado" e enviará um sinal para a bobina Y1. Quando a bobina Y1 é energizada, a saída Y1 acende com uma lâmpada conectada a ela.

Deve-se entender que o contato X1 e a bobina Y1 são conectados usando fios, e o “sinal” que aparece no monitor do computador é virtual. Eles não existem como componentes elétricos reais. Eles estão presentes apenas em um programa de computador - parte do software - e se assemelham ao que está acontecendo no circuito de relés.
É igualmente importante entender que o computador usado para escrever e editar o programa não é necessário para uso posterior do PLC. Após o programa ter sido carregado no controlador programável, o computador pode ser desligado e o PLC executará independentemente os comandos do programa. Incluímos um monitor de computador pessoal na ilustração para que você entenda a conexão entre condições reais (status do fechamento da chave e da lâmpada) e status do programa (sinais através de contatos virtuais e bobinas virtuais).
O verdadeiro poder e versatilidade do PLC é revelado quando queremos mudar o comportamento do sistema de controle. Como o PLC é um dispositivo programável, podemos alterar os comandos que configuramos sem reconfigurar os componentes conectados a ele. Suponha que tenhamos decidido mudar a função “switch - light bulb” ao contrário: pressione o botão para desligar a luz e solte-o para ligá-lo.
A solução para esse problema em condições reais é que o comutador "aberto" em condições normais seja substituído por um "fechado". Sua solução de software está alterando o programa para que o contato X1 em condições normais seja "fechado" e não "aberto".
Na imagem a seguir, você verá um programa já alterado, com o interruptor não ativado:

E aqui o interruptor está ativado:
Uma das vantagens de implementar o controle lógico no software, em vez de controlar o uso de hardware, é que os sinais de entrada podem ser usados quantas vezes forem necessárias. Por exemplo, considere um circuito e um programa projetado para acender uma lâmpada se pelo menos dois dos três interruptores estiverem ativados ao mesmo tempo:

Para construir um circuito semelhante usando um relé, três relés com dois contatos abertos serão necessários em condições normais, cada um dos quais deve ser usado. No entanto, usando o PLC, podemos programar quantos pinos para cada entrada “X” gostaríamos sem adicionar nenhum equipamento adicional (cada entrada e saída deve ocupar não mais que 1 bit na memória digital do PLC) e chamá-los quantas vezes for necessário .
Além disso, como cada saída do CLP não ocupa mais que um bit em sua memória, podemos adicionar contatos ao programa, trazendo a saída Y para um estado inativo. Por exemplo, pegue um diagrama do motor com um sistema de controle para iniciar e parar o movimento:

O interruptor conectado à entrada X1 serve como o botão "Iniciar", enquanto o interruptor conectado à entrada X2 serve como o botão "Parar". Outro contato, chamado Y1, como imprimir em contato, permite que o contator do motor permaneça energizado, mesmo que você solte o botão Iniciar. Nesse caso, é possível ver como o contato X2, "fechado" em condições normais, aparece no bloco de cores, mostrando assim que está no estado "fechado" ("eletricamente condutor").
Se você pressionar o botão "Iniciar", uma corrente passará pelo contato "fechado" X1 e enviará 120 VCA ao contator do motor. O contato paralelo Y1 também "fecha", fechando assim o circuito:

Se pressionarmos agora o botão "Iniciar", o contato X1 entrará no estado "aberto", mas o motor continuará funcionando, porque o contato fechado Y1 ainda manterá a bobina energizada:

Para parar o motor, você precisa pressionar rapidamente o botão "Stop", que informará a tensão na entrada X1 e o contato "aberto", o que levará ao término da alimentação de tensão da bobina Y1:

Quando você pressionou o botão "Stop", a entrada X1 ficou sem tensão, retornando o contato X1 ao estado "fechado" normal. Sob nenhuma circunstância o mecanismo funcionará novamente até você pressionar o botão Iniciar novamente, porque a impressão no pino Y1 foi perdida:

Um modelo tolerante a falhas de dispositivos de controle de PLC é muito importante, como é o caso de dispositivos de controle eletromecânicos de relés. É sempre necessário levar em consideração o efeito de um contato "aberto" por engano na operação do sistema. Por exemplo, no nosso caso, se o contato X2 for erroneamente "aberto", não haverá como parar o motor!
A solução para esse problema é reprogramar o contato X2 dentro do PLC e pressionar o botão Parar:

Quando o botão "Stop" não é pressionado, a entrada do PLC X2 é energizada, ou seja, o contato X2 está "fechado". Isso permite que o motor inicie a operação quando a corrente é comunicada ao terminal X1 e continue a operação quando o botão "Start" for liberado. Quando você pressiona o botão "Stop", o contato X2 entra no estado "aberto" e o motor para de funcionar. Assim, você pode ver que não há diferença funcional entre este e o modelo anterior.
No entanto, se o terminal de entrada X2 foi erroneamente "aberto", a entrada X2 pode ser parada pressionando o botão "Stop". Como resultado, o motor é desligado imediatamente. Este modelo é mais seguro que o anterior, onde pressionar o botão "Stop" tornará impossível parar o motor.
Além das entradas (X) e saídas (Y) no PLC, é possível usar “contatos e bobinas internas. Eles são usados da mesma maneira que os relés intermediários usados em circuitos de relés padrão.
Para entender o princípio de operação dos circuitos e contatos “internos”, considere o seguinte circuito e programa desenvolvido com base nas três entradas da função lógica AND:

Nesse circuito, a lâmpada fica acesa até que um dos botões seja pressionado. Para desligar a lâmpada, pressione todos os três botões:

Este artigo sobre controladores lógicos programáveis ilustra apenas uma pequena amostra de seus recursos. Como um computador com CLP, ele pode executar outras funções avançadas com muito mais precisão e confiabilidade do que quando utiliza dispositivos lógicos eletromecânicos. A maioria dos CLPs possui mais de seis entradas e saídas. A ilustração a seguir mostra um dos PLCs da Allen-Bradley:

Com módulos, cada um com 16 entradas e saídas, este CLP tem a capacidade de controlar uma dúzia de dispositivos.Um CLP colocado no painel de controle ocupa pouco espaço (para relés eletromecânicos que executam as mesmas funções, seria necessário muito mais espaço livre).

Uma das vantagens do PLC, que simplesmente não pode ser duplicada por um relé eletromecânico, é o monitoramento e controle remoto via rede digital do computador. Como um CLP nada mais é do que um computador digital especializado, ele pode "conversar" facilmente com outros computadores. A próxima foto é uma representação gráfica do processo de enchimento de líquidos (estação de bombeamento para tratamento de águas residuais municipais) controlado por um CLP. Além disso, a própria estação está localizada a poucos quilômetros do monitor do computador.
Veja também em bgv.electricianexp.com
: